Computer Vision
Computer Vision Test Platform
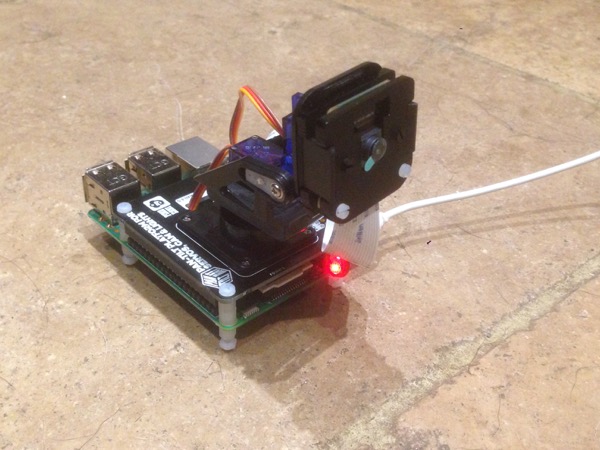
As part of learning about robotics and ROS, the time has come to start playing with computer vision software in the shape of OpenCV. To do this, I’ve decided to set up a Raspberry Pi with the Pi camera and a 2-axis gimbal so I can perform image analysis and then respond to the results in the physical world - maybe tracking a ball, for instance.
I was originally going to do it on the cheap using stuff I already had plus a basic Arduino i2c interface for the gimbal servos but my Raspberry Pi camera turned out to be faulty so, as well as buying a replacement, I decided to save myself some work on the Arduino interface and purchased Pimoroni’s Pan/Tilt Hat.
Here’s the assembled unit, ready to start learning about computer vision and image processing:
I’ll post interesting tutorials and experiments here in the future.
Posted on 29 March 2017