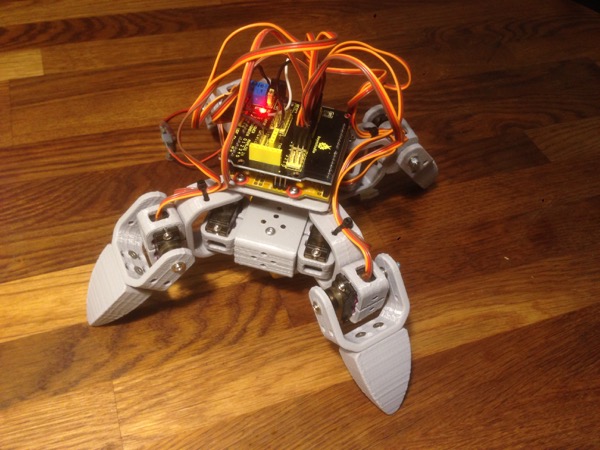
Allbot
Power Board
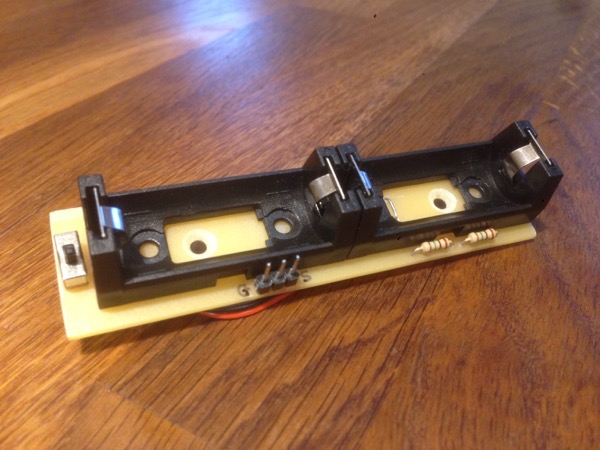
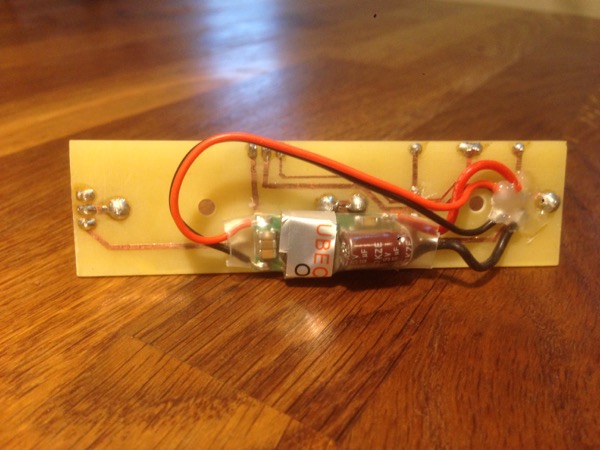
To allow the Allbot to operate untethered, I need to find a suitable on-board power supply. The off-the-shelf product includes a shield with 4xAA batteries but that wouldn’t work for me as the sensor shield I’m using doesn’t have a right-angled servo header to allow another shield to be mounted above it. I do have some spare 16340 Li-ion rechargeable cells and holders, however, and there’s a perfect space for them on the underside of the robot’s body. So I etched a simple PCB with the battery holders, a small 5V BEC, a power switch and a 3-pin connector for 5V, ground and scaled unregulated voltage for low-voltage detection. Here’s the resulting board:
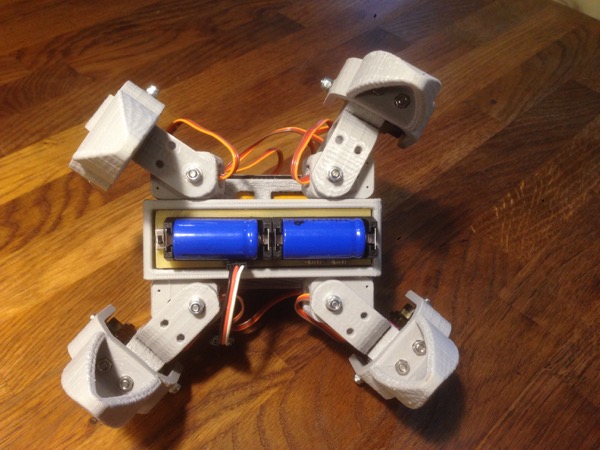
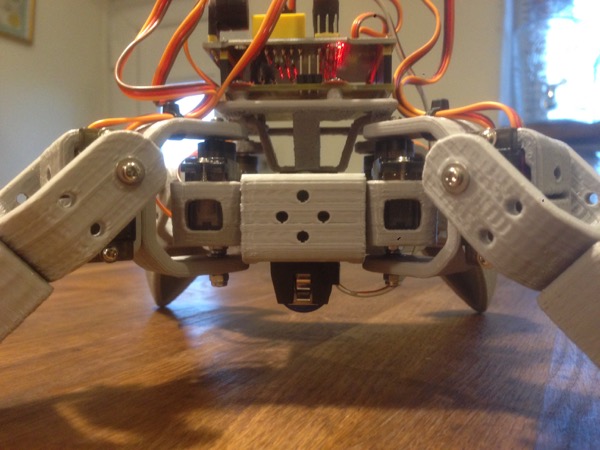
And here it is fitted:
Posted on 17 March 2017