ROSbot
ROSbot 2.0
It’s time to upgrade ROSbot. It needs a larger frame to accommodate a Kinect sensor and more powerful motors to drive the extra weight around.
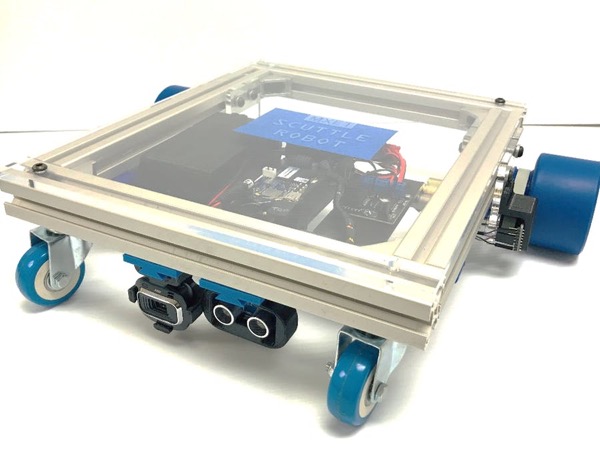
Inspired by the Scuttle mobile utility robot project on Hackster.io, I’m going to use some short 2020 T-slot extrusions I salvaged from an old 3D printer for the chassis. The drive system will (hopefully) use a couple of spare brushless motors. Here’s a photo of the Scuttle robot to show the direction I’m going with this:
Posted on 14 December 2018